探测器软着陆中自主障碍区域选取方法
首发时间:2013-08-02
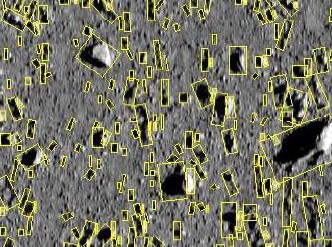
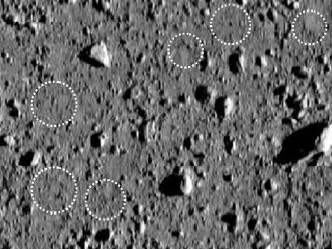
摘要:针对探测器在小天体表面精确着陆的问题,提出了一种在探测器着陆末端利用被动图像进行自主障碍地形识别的方法。首先将基于二维最大熵的双阈值分割方法用于提取岩石阴影及其光照区域,然后将阈值分割图像进一步进行处理,包括合并光照和阴影区域形成障碍区域以及连通区域提取等操作。由于安全着陆点的选取不仅要对小天体表面着陆区域进行地形安全评估,还应考虑探测器着陆地点的科学考察价值,所以,需要尽可能保留障碍区域地形的每个细节。最后,利用最小外接矩形将危险区域地形标出,为选择安全着陆区域提供保障。仿真结果表明,本文给出的障碍地形识别方法能够有效区分危险与安全地形区,为保证探测器在小天体的精确软着陆提供重要保障。
For information in English, please click here
Obstacles Areas Extraction for Soft Landing Detector
Abstract:An algorithm for autonomous recognition of obstacles terrain based on the image is proposed. Firstly, referenced rocks` shadow and light areas are extracted by the use of double threshold segmentation based on the two-dimensional maximum entropy. Then, the threshold segmentation image is processed further, including the combination of the shadow and light areas in order to form barrier areas and extracting connected areas etc. Because of the selection of the safe landing areas should not only take the safety into consideration, but also pay more attention to the value of scientific research, the maximum details should be reserved. Finally, dangerous areas are shown by the use of minimum circumscribed rectangle. Experiments demonstrate that the algorithm can be used to divide the safe and dangerous areas accurately and it proves that the method proposed is feasible and robust.
Keywords: asteroid soft landing obstacles terrain two-dimensional maximum entropy double threshold segmentation
论文图表:
引用


No.****
同行评议
勘误表
探测器软着陆中自主障碍区域选取方法
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论