用于物流领域的两轮自平衡小车系统设计
首发时间:2017-12-07
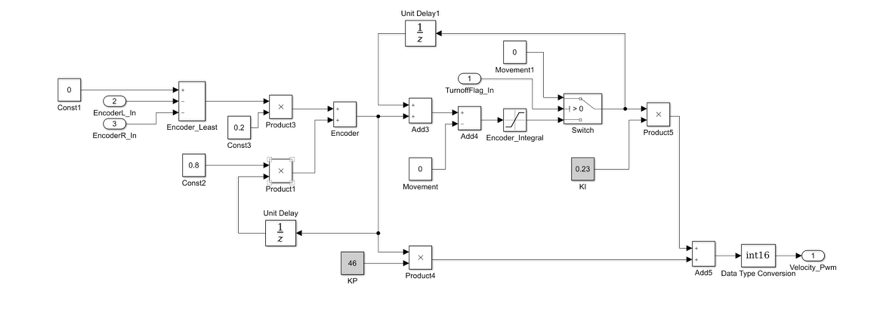
摘要:本文介绍一种用于物流应用的两轮自平衡小车系统设计,系统以TMS320F28069型号DSP作为主控制芯片,使用六轴运动传感器MPU6050采集角度信号和加速度信号,通过PID控制原理计算PWM输出量,控制驱动芯片DRV8833驱动直流电机的运行,同时用霍尔传感器采集电机位置及转速,使用TSL1401CL线性图像传感器进行路径寻迹,两轮自平衡小车具有零转弯半径的优势,可以在狭小的空间实现搬运,软件方面,通过MATLAB中的Simulink进行控制模型建模以及代码生成,并结合C语言编程,实现既可以按照设定黑线路径自行运动,也可用通过蓝牙串口接收手机APP指令进行遥控运动,还可以利用超声波传感器实现跟随运动,可在平衡运动的基础上实现灵活的搬运方案。
For information in English, please click here
System design of a two-wheel self-balanced vehicle for logistics
Abstract:An application design of self-balanced vehicle for logistics is introduced in this paper. One kind of DSP named TMS320F28069 is used as a main-controller in the system and a six-axis motion sensor MPU6050 is detecting the angular velocity and acceleration signal, the chip DRV8833 is employed to drive the DC motor, meanwhile the hall sensor can get the position and speed of the motor, tracking with CCD device TSL1401CL.The two-wheel self-balanced vehicle is advantaged in zero turning radius, thus it can carry things in narrow space. The control module is build with MATLAB/Simulink, and combined with C code generated to realize movement and tracking lines. Besides it could receive the instruction from mobile applications through Bluetooth, and follow other vehicles with ultrasonic device, as to achieve flexible handling solutions.
Keywords: self?balanced vehicle tracking carrier
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
用于物流领域的两轮自平衡小车系统设计
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论