基于动态模型更新与结果融合的目标跟踪
首发时间:2018-02-20
摘要:单一跟踪器目标跟踪时会受到光照变化、遮挡、目标尺寸改变等情况的影响,导致跟踪结果不可靠。融合多个跟踪器的估计结果可以结合不同模型的优点,有效提升跟踪效果。为了更好的对不同跟踪器的跟踪结果进行融合,本文通过分析跟踪响应图的震荡情况来采取不同的权值进行结果融合,同时提出了动态的模型更新策略来避免不合适的模型更新所导致的目标“漂移”。本文在Staple跟踪算法的基础上利用提出方法进行改进,并在著名的目标跟踪领域的评估标准OTB下进行性能评估。通过实验发现本文所提出的方法在背景干扰、光照变化、脱离视野、变形等情况下仍能取得良好的效果。
For information in English, please click here
Target Tracking based on Dynamic Model Updating and Result Fusing
Abstract:The result of single tracker can sometimes be unreliable in some situation like illumination variation, occlusion, object size change, etc. The ensemble approach can combine the advantages of difference models and overcome this limitation, improving the performance of visual tracking. In order to better ensemble the different trackers' result we propose a adaptively assemble method that can choice the weight of each track result by analyzing the fluctuation degree of response map. Moreover, we propose a adaptively update strategy to avoid the "drift" in tracking which result by unsuitable model update. In this paper, we expanded Staple using our methods and evaluate the performance on famous object tracking benchmark OTB. After experience, the proposed method can still outperforms effective in the situation of cluttered background, illumination variation, out-of-view, deformation, etc .
Keywords: object tracking result fusion model update
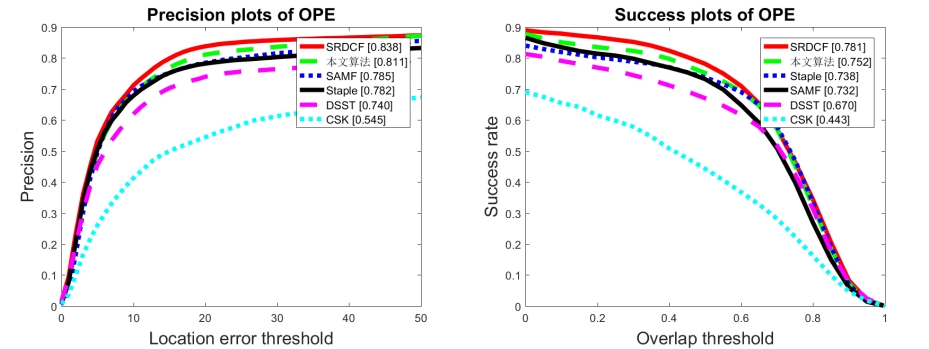
论文图表:
引用


No.****
同行评议
共计0人参与
勘误表
基于动态模型更新与结果融合的目标跟踪
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论