移动机器人视觉受污应急规划
首发时间:2018-06-12
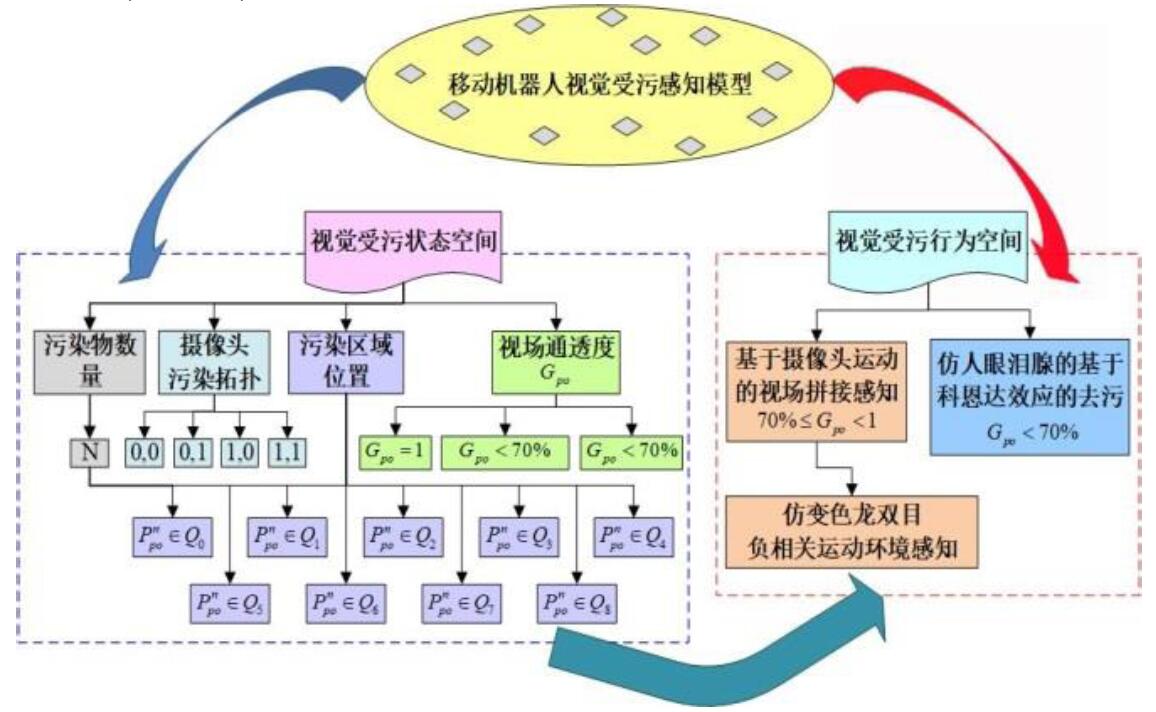
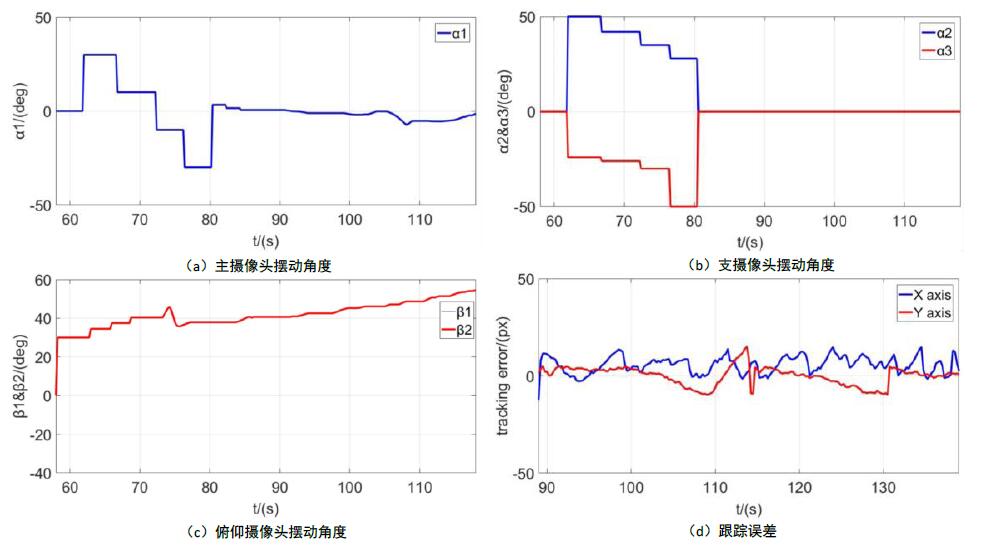
摘要:为了提高机器人在非结构化的环境中的适应能力,对视觉受污采取应急规划。本文提出了基于自省式案例推理(CBR)机器人视觉受污后的应急规划,使其具备降级使用功能。同时提出隔帧差分法与visual background extrector (ViBe)算法相结合的方法,对移动机器人摄像头污染物进行提取。根据污染物特征信息,主要采取两种应急规划方案:1)基于视场拼接扫描策略;2)基于科恩达效应的污染物清洁策略。实验结果表明,基于视场拼接扫描策略能够很好的利用剩余的视场寻找到目标并跟踪,基于科恩达效应的污染物清洁策略也能实现摄像头清洁工作。
关键词: CBR;应急规划;视觉受污;污染物检测;深度学习;视觉清洁
For information in English, please click here
Contingency planning of the mobile robot vision contamination
Abstract:A contingency planning was presented for the visual contamination of the mobile robot based on the framework of case based reasoning (CBR) introspection in this paper, so as to enable the robot to have degraded functions. The method of combining the frame-difference method with the visual background extrector (ViBe) algorithm was proposed to extract the pollutants from the cameras of the mobile robot. According to the pollutant characteristic information, two emergency planning schemes are mainly adopted: 1) the scanning strategy based on field-of-view stitching, 2) the pollutant cleaning strategy based on the Coanda effect. Experimental results show that the scanning strategy based on field-of-view splicing can use the remaining field of view to find the target and track it, and the cleaning strategy based on the Coanda effect can also achieve the camera cleaning.
Keywords: CBR Emergency Planning Visual Contaminant Contamination detection Deep learning Visual cleaning
论文图表:




引用


No.****
同行评议
勘误表
移动机器人视觉受污应急规划
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论