基于MPU6050的运动目标轨迹追踪系统
首发时间:2018-09-30
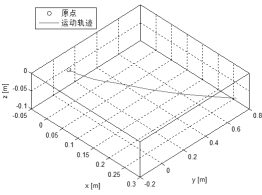
摘要:运动目标轨迹追踪系统在导航应用、模式识别、人机交互等领域应用十分广泛,而传统的追踪系统存许多缺陷,例如测量过程受参考系制约、设备运作复杂、系统开销大等。本文设计了一种基于MPU6050的运动目标轨迹跟踪系统。系统以MSP430F169为主控芯片,通过MPU6050六轴传感器检测运动目标的加速度和角速度以及倾角等参数,进行静态误差校准后,通过串口传输到PC端。在PC机中进行数据处理,对加速度校正值进行Kalman滤波消除随机噪声,再进行积分运算,从而得到目标在三维空间运动的轨迹坐标位置,最终绘制出运动轨迹线路并计算出位移值。
关键词: 轨迹追踪 MPU6050 MSP430F169 Kalman滤波.
For information in English, please click here
The Trajectory Tracking System Of Moving Target Based On MPU6050
Abstract:The trajectory tracking of moving target has been widely used in various fields, such as navigation system, pattern recognition and human-computer interaction. However, the traditional tracking systems has many defects, for example, the measurement process is limited by the reference system, the equipment operation is complex, and the system cost is large. This paper designs a moving target trajectory tracking system based on MPU6050. The system uses the MSP430F169 as the main control chip. It detects the acceleration and angular velocity and tilt angle of the moving target through the MPU6050 six-axis sensor. After the static error is calibrated, the Data is transmitted to the PC through the serial port. Acceleration correction values are obtained and transmitted to the PC through the serial port. Data processing is performed in the PC, Kalman filtering is performed on the acceleration correction value to eliminate random noise, and then the integral operation is performed to obtain the trajectory coordinate position of the target in three-dimensional space motion. Finally, a motion trajectory line is drawn and the displacement value is calculated.
Keywords: Trajectory tracking MPU6050 MSP430F169 Kalman filtering.
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
基于MPU6050的运动目标轨迹追踪系统
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论