基于遗传BP神经网络的采摘机器人手眼标定研究
首发时间:2019-03-15
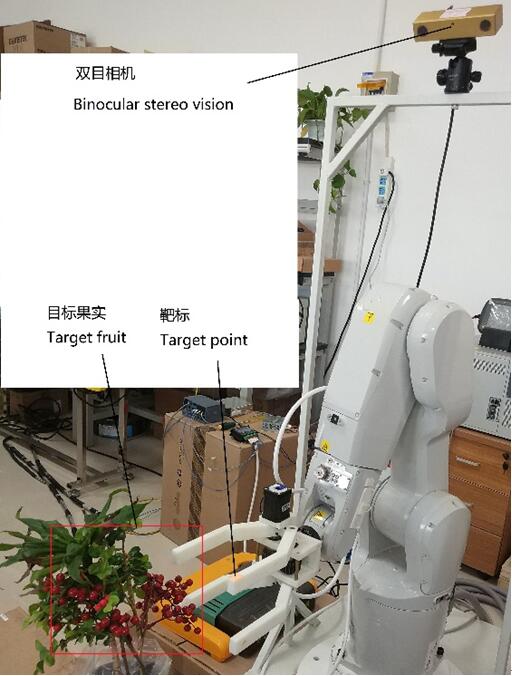
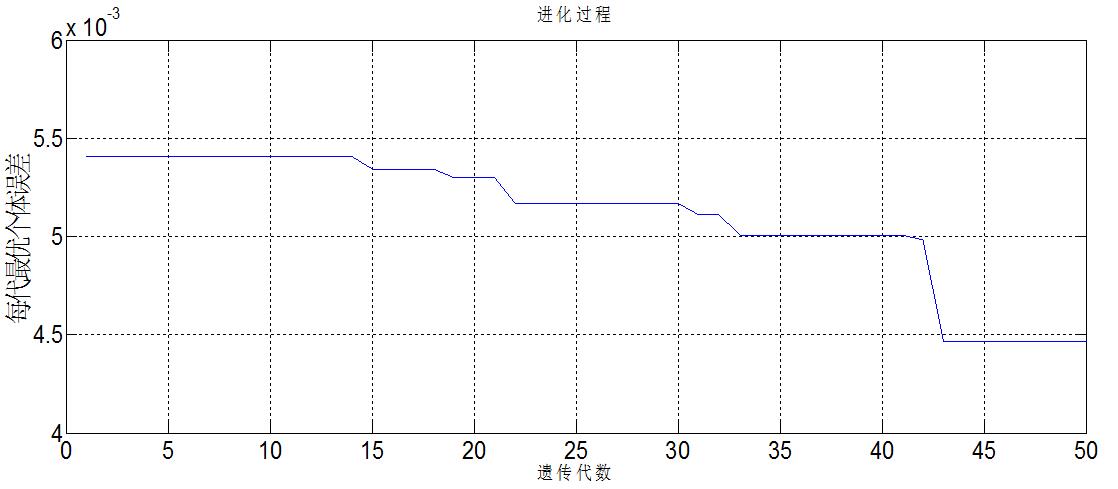
摘要:双目立体视觉是果蔬采摘机器人使用较多的目标识别与定位的方法,手眼系统的标定结果直接影响采摘机器人的作业精度。为了提高固定双目相机手眼标定精度,文章提出了一种利用遗传算法优化的back-propagating (BP)神经网络的手眼系统标定算法。分别将靶标在相机坐标系与机械臂坐标系下的坐标作为输入量与输出量建立了BP神经网络标定模型,并针对BP神经网络模型存在易陷入局部极小值收敛速度慢的缺点,引入了遗传算法来优化BP神经网络的初始权值和阈值。实验表明:与BP神经网络模型和传统的多元线性回归拟合模型相比,经遗传算法优化后的BP神经网络模型能显著降低标定误差,加快收敛速度。遗传BP神经网络模型样本预测结果与实测值之间的距离平均误差1.7126mm,优于BP神经网络模型的平均误差2.4002mm和线性回归模型的平均误差3.3771mm。
关键词: 采摘机器人 固定双目视觉 手眼标定 遗传BP神经网络 线性回归
For information in English, please click here
Research on Hand-eye calibration method based on genetic BP neural network for harvesting Robot
Abstract:In the field of harvesting robot control with vision feedback, hand-eye system calibration is very important which directly affects the precision of the task.In order to improve the accuracy of fixed binocular camera hand-eye calibration, a hand-eye system calibration algorithm using back-propagating (BP) neural network optimized by genetic algorithm was proposed in this paper. The BP neural network calibration model was established by using the coordinates of the target in the camera coordinate system and the robot arm coordinate system as the input and output. Because the BP neural network model has the disadvantage of being trapped in the local minimum, a genetic algorithm is introduced to optimize the initial weights and thresholds of the BP neural network. The results showed that compared with the traditional multiple linear regression fitting model and BP neural network model, The BP neural network model optimized by genetic algorithm can significantly reduce the calibration error and speed up the convergence. The average errors for the measured distances between the tested results and the predicted ones by the proposed genetic BP neural network model, the conventional BP neural network model, and the linear regression fitting model were 1.7126mm, 2.4002mm, and 3.3771mm, respectively.
Keywords: Harvesting robot fixed binocular vision Hand-eye calibration genetic back-propagating (BP) neural network linear regression
论文图表:

引用


No.****
动态公开评议
共计0人参与
勘误表
基于遗传BP神经网络的采摘机器人手眼标定研究
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论