基于滑模控制的变结构机器人轨迹跟踪及仿真
首发时间:2019-03-28
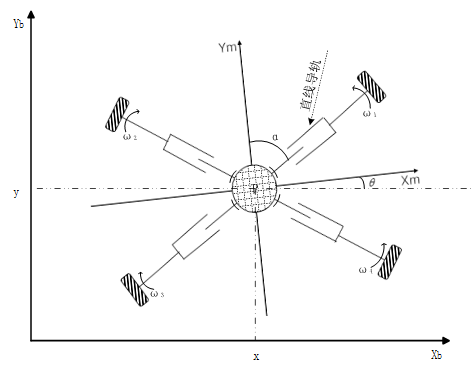
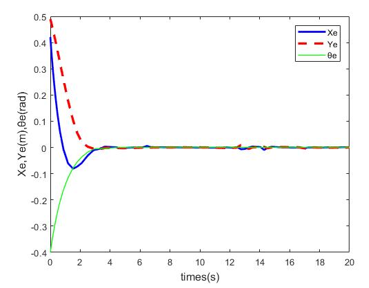
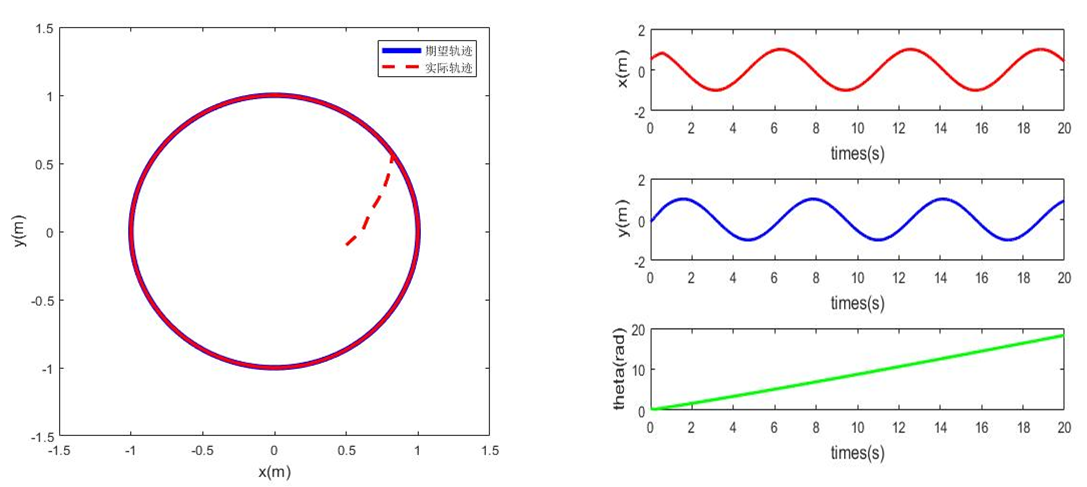
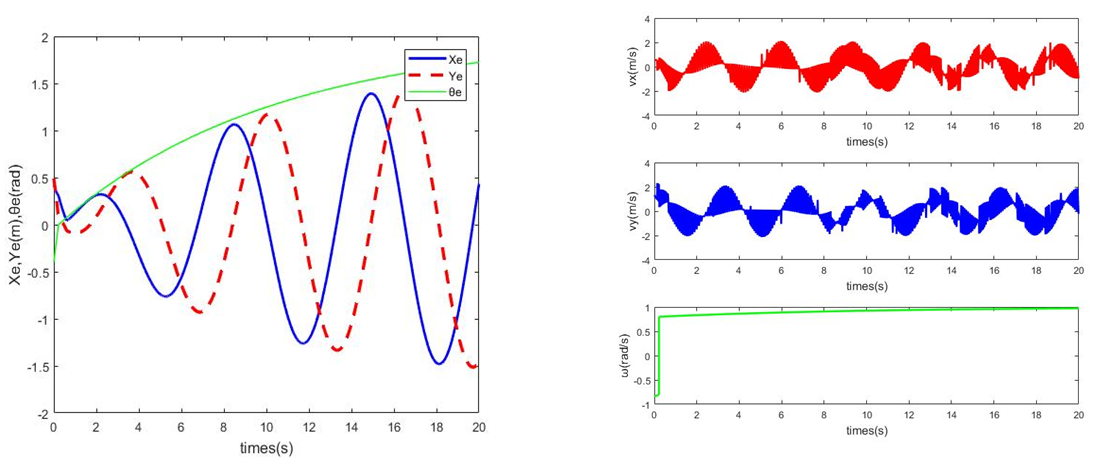
摘要:为了提高变结构机器人沿既定轨迹行驶的跟踪精度,本文基于一种底盘可变的移动机器人的运动学模型,针对其轨迹跟踪问题展开研究。轨迹跟踪控制器的设计基于滑模变结构控制理论,首先根据运动学模型将轨迹跟踪问题转化为误差镇定问题,之后设计切换函数,得到控制律。使用Simulink进行仿真分析,调整控制参数,观测各个参数的影响效果。并通过仿真验证了所设计滑模控制器的有效性。
For information in English, please click here
Trajectory Tracking and Simulation of Variable Structure Robot Based on Sliding Mode Control
Abstract:In order to improve the tracking accuracy of the variable structure robot along a given trajectory, the trajectory tracking problem based on a kinematic model of a mobile robot with variable chassis was studied in the paper. The design of the trajectory tracking controller is based on the sliding mode variable structure control theory. Firstly, the trajectory tracking problem is transformed into the error stabilization problem according to the kinematics model. Then, the switching function is designed to obtain the control law. Use Simulink for simulation analysis, adjust control parameters, and observe the effects of each parameter. The effectiveness of the designed sliding mode controller is verified by simulation.
Keywords: Variable structure robot Kinematic model Trajectory tracking Sliding mode control
基金:
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
基于滑模控制的变结构机器人轨迹跟踪及仿真
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论