基于时间最优的机械手关节空间轨迹规划
首发时间:2019-05-14
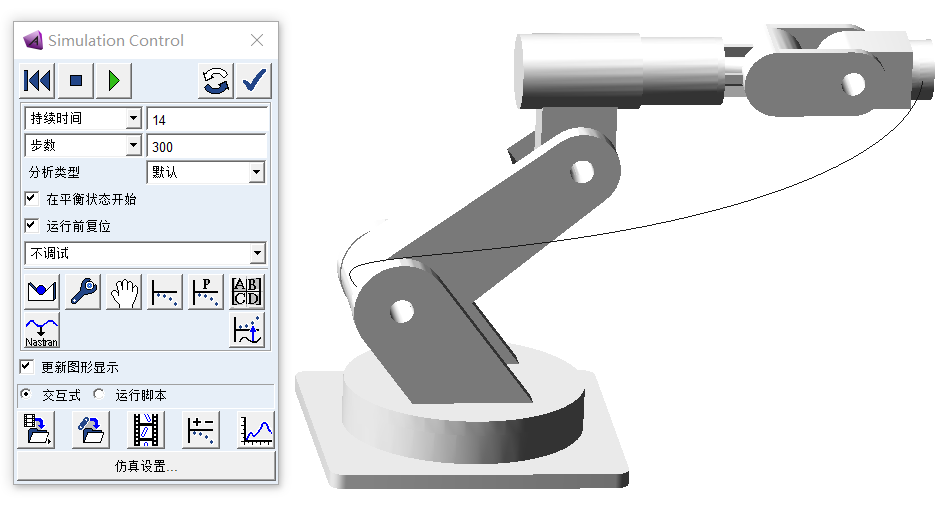
摘要:为了减少数控车床上料时间,本文提出一种时间最优轨迹规划方法。建立机械手运动学模型,应用几何法结合代数法求得上料过程中关键位置对应的关节角度;以取料过程为研究对象,基于ADAMS构建了机械手虚拟样机,利用B样条曲线作为轨迹规划方法仿真了前三关节型值点间运动过程;以时间最优为目标,引用遗传算法来优化机械手取料过程运行的时间,运动过程满足速度、加速度以及加加速度约束条件。
关键词: 机械设计及理论 工业机器人 运动学分析 时间优化 轨迹控制
For information in English, please click here
Research on Manipulator Joint Space Trajectory Planning Algorithm Based on Optimal Time
Abstract:In order to reduce the feeding time of NC lathe, a time optimal trajectory planning method is proposed in this paper. The kinematics model of the manipulator is established, and the joint angle corresponding to the key position in the feeding process is obtained by geometric method and algebraic method;A virtual prototype of manipulator is constructed based on ADAMS to study the material acquisition process. The motion process between the first three joints is simulated by using B-spline curve as trajectory planning method;Taking time optimization as the optimization objective, genetic algorithm is used to optimize the operation time of the manipulator\'s feeding process. TheTime Optimal TTime Optimal Trajectory Planning of Robot Manipulator Based on Genetic Algorithmsrajectory Planning of Robot Manipulator Based on Genetic Algorithms motion process satisfies the constraints of angular velocity, angular acceleration and angular acceleration.
Keywords: Mechanical Design and Theory Industrial Robots KinematicAnalysis Time Optimization Trajectory Planning
基金:
论文图表:

引用


No.****
动态公开评议
共计0人参与
勘误表
基于时间最优的机械手关节空间轨迹规划
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论