直线驱动型Delta机器人准滑模控制研究
首发时间:2019-05-22
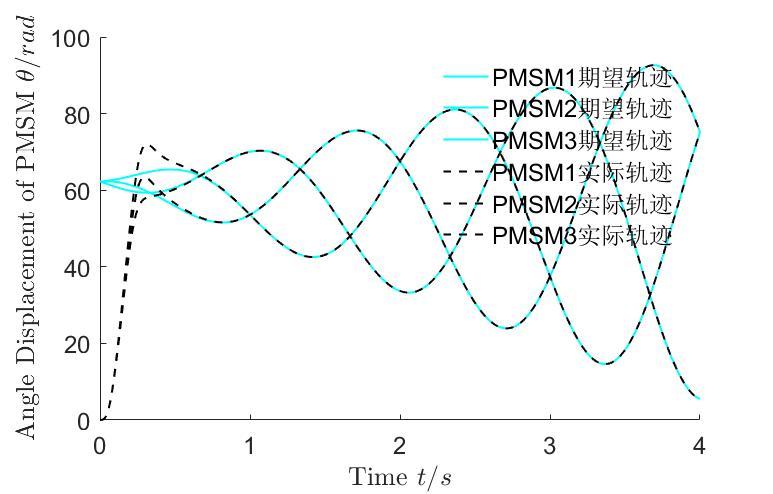
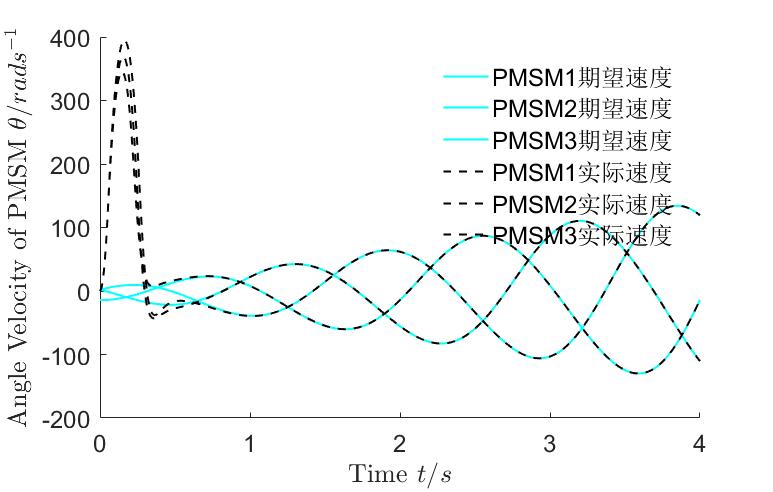
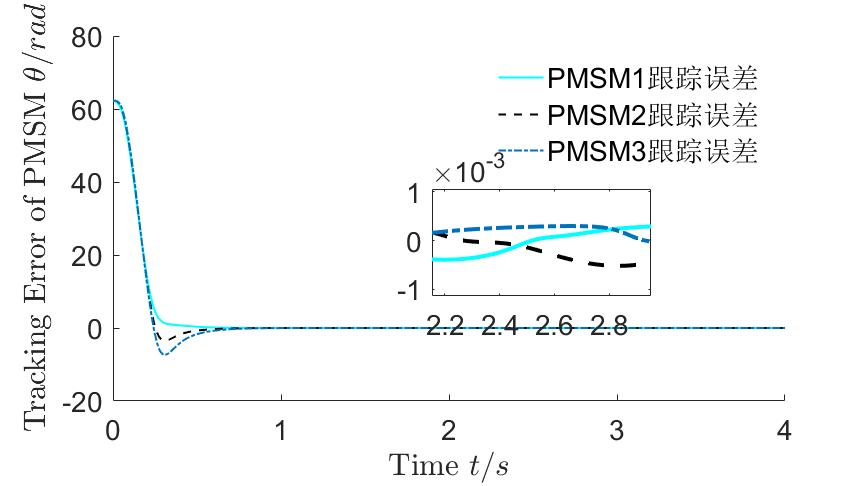
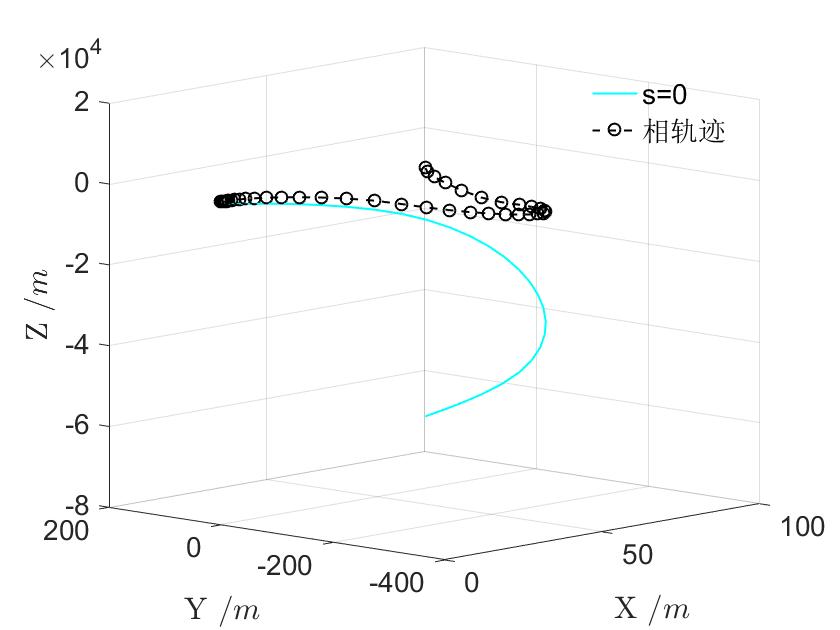
摘要:Delta并联机器人是直线驱动型Delta机器人准滑模控制研究直线驱动型Delta机器人准滑模控制研究直线驱动型Delta机器人准滑模控制研究复杂空间多链结构,且运动过程中有参数摄动和动态干扰,传统的控制手段难以达到理想的控制效果。本文使用闭环矢量方程推导了直线驱动型 Delta 机器人的运动学逆解,并基于运动学逆解提出采用双曲正切函数趋近律的准滑模控制策略,利用李雅普诺夫原理证明了系统的稳定性。在MATLAB中进行仿真,结果表明本文提出的准滑模控制策略不仅削弱了滑模控制的高频抖振,还具有良好的轨迹跟踪效果。
关键词: 机械电子工程 直线驱动型Delta机器人 逆运动学 准滑模控制 轨迹跟踪
For information in English, please click here
Research on quasi sliding mode control of Linear Delta Robot
Abstract:Delta robot is a complex spatial multi-chain structure, and there are parameter perturbations and dynamic disturbances in the process of motion, hus conventional control methods are difficult to achieve the desired control effect. In this paper, the inverse kinematics model of Linear Delta is deduced by closed-loop vector equation. Based on the inverse kinematics model, a quasi-sliding mode control strategy with hyperbolic tangent function reaching law is proposed and the stability of the system is proved via Lyapunov principle. The simulation results in MATLAB show that the proposed quasi-sliding mode control strategy not only weakens the high frequency chattering in sliding mode control, but also has satisfying trajectory tracking effect.
Keywords: Mechatronic Engineering Linear Delta inverse kinematics quasi-sliding mode control strategy trajectory tracking
基金:
论文图表:

引用


No.****
动态公开评议
共计0人参与
勘误表
直线驱动型Delta机器人准滑模控制研究
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论