基于深度学习的机载对地目标检测方法
首发时间:2019-05-22
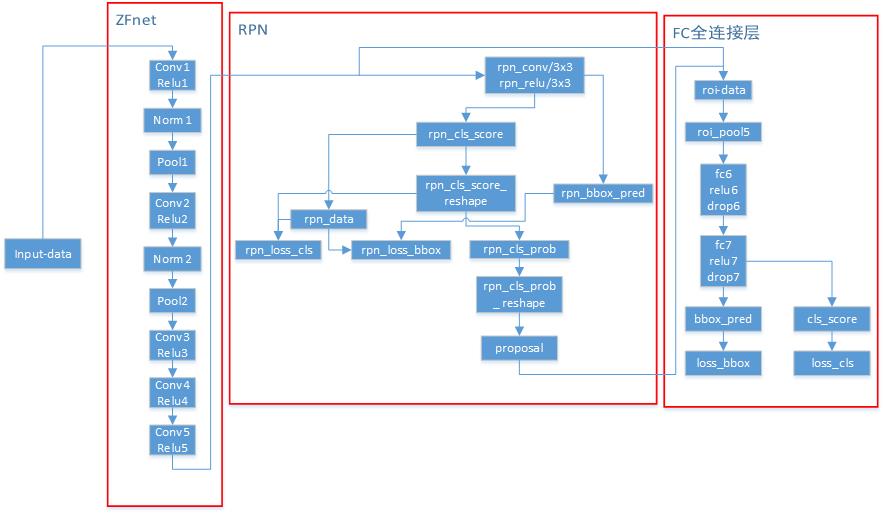
摘要:在实际运动场景下,由于无人机相机拍摄到的地面目标图像面积较小,地面目标信息量少,这导致传统的目标检测方法对小目标的检测精度较低。为了有效地提高识别和跟踪地面车辆的精度,本文提出了一种基于Faster R-CNN算法的机载对地目标检测与跟踪方法。对RPN网络生成候选区域进行优化,并利用无人机的嵌入式系统将软硬件进行有效的结合,实现机载对地目标的检测与跟踪。实验结果表明,该方法可以显著地提高对地面目标的检测准确性。
关键词: 地面目标检测 Faster R-CNN 机载平台 目标跟踪
For information in English, please click here
An airborne ground target detection method based on deep learning
Abstract:In the actual moving scene, due to the small area of the ground target image taken by the UAV camera and the small information content of the ground target, the detection accuracy of the traditional target detection method for small targets is low. In order to effectively improve the accuracy of ground vehicle recognition and tracking, a Faster r-cnn algorithm based on airborne ground target detection and tracking method is proposed in this paper. The region proposal generated by RPN network is optimized, and the embedded system of UAV is utilized to effectively combine software and hardware, so as to realize airborne detection and tracking of ground targets. Experimental results show that this method can significantly improve the accuracy of ground target detection.
Keywords: Ground target detection Faster R-CNN Airbone platform Target tracking
基金:
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
基于深度学习的机载对地目标检测方法
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论