基于SVPWM的无齿轮永磁同步曳引机模糊直接转矩控制系统的研究及设计
首发时间:2019-05-24
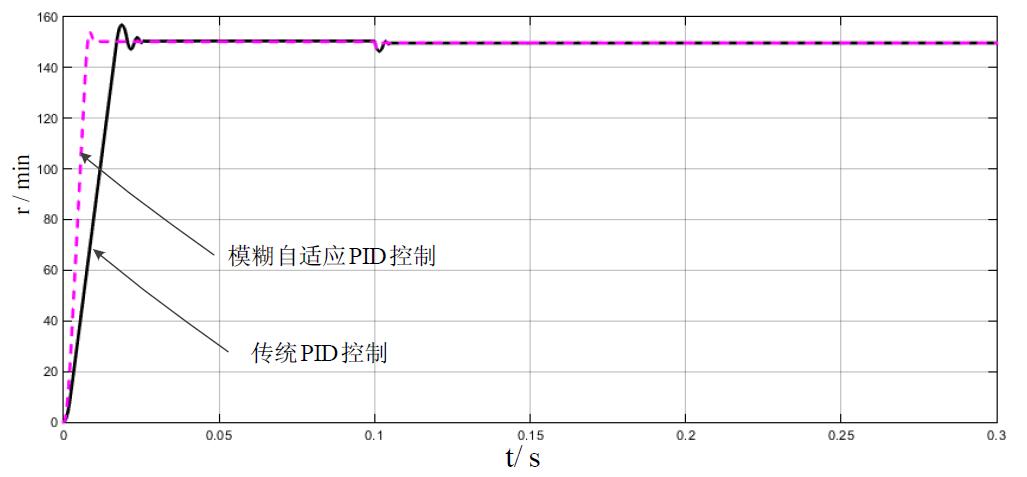
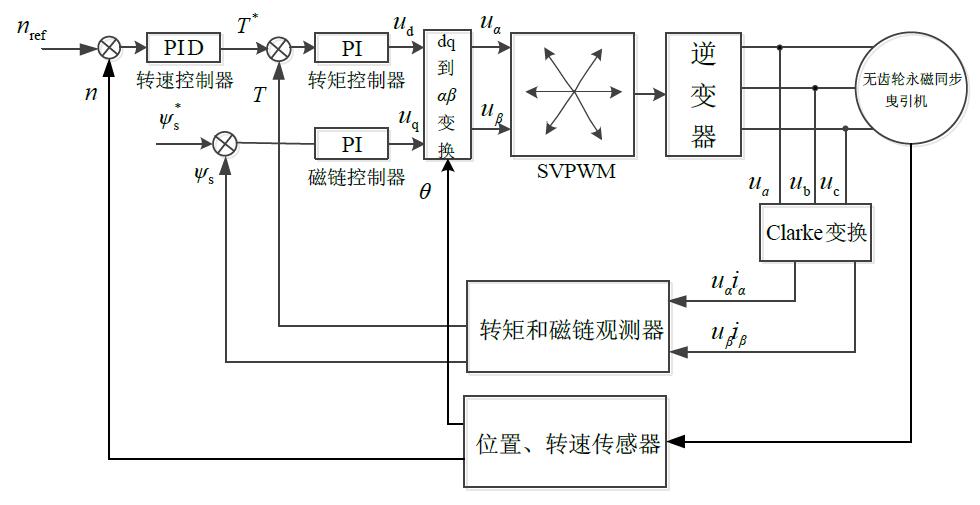
摘要:电梯作为高层建筑中重要的运输工具,需要满足快速性和舒适性的基本要求。本文以无齿轮永磁同步电梯曳引机为研究对象,在直接转矩控制原理的基础上,结合空间矢量脉宽调制技术,提出一种基于SVPWM的无齿轮永磁同步曳引机直接转矩控制策略。然后,利用模糊控制算法对传统的PID速度控制器进行优化,将设计的模糊自适应PID速度控制器应用到电梯曳引机调速系统中,并与传统PID控制下的调速系统进行比较。最后,结合抛物线形电梯速度曲线对电梯曳引机调速系统进行分析。仿真结果显示采用模糊自适应PID控制的电梯曳引机调速系统具有较快的动态响应速度和较强的抗干扰能力,对抛物线形电梯速度曲线具有较好的跟踪性,验证了模糊自适应PID控制算法应用于电梯调速系统的可行性。
关键词: 电梯曳引机 SVPWM 直接转矩控制 模糊自适应控制 电梯速度曲线
For information in English, please click here
Research and Design of Fuzzy Direct Torque Control System for Gearless Permanent Magnet Synchronous Traction Machine Based on SVPWM
Abstract:As an important means of transportation in high-rise buildings, elevators need to meet the basic requirements of speed and comfort.In this paper, the gearless permanent magnet synchronous traction machine for elevator is taken as the research object. Based on the principle of direct torque control and the space vector pulse width modulation technology, a direct torque control strategy based on SVPWM for gearless permanent magnet synchronous traction machine is proposed.Then, the fuzzy PID control algorithm is used to optimize the traditional PID speed controller, and the designed fuzzy adaptive PID speed controller is applied to the elevator traction machine speed control system and compared with the speed control system under the traditional PID control.Finally, combined with the parabolic elevator speed curve, the elevator traction machine speed control system is analyzed.The simulation results show that the elevator traction machine speed control system with fuzzy adaptive PID control has faster dynamic response speed and stronger anti-interference ability, and has better tracking performance for the parabolic elevator speed curve, which verifies the feasibility of the fuzzy adaptive PID control algorithm applied to the elevator speed control system.
Keywords: Elevator traction machine SVPWM Direct torque control Fuzzy adaptive control Elevator speed curve
基金:
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
基于SVPWM的无齿轮永磁同步曳引机模糊直接转矩控制系统的研究及设计
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论