基于UWB的跟随箱包对目标的定位研究
首发时间:2019-05-07
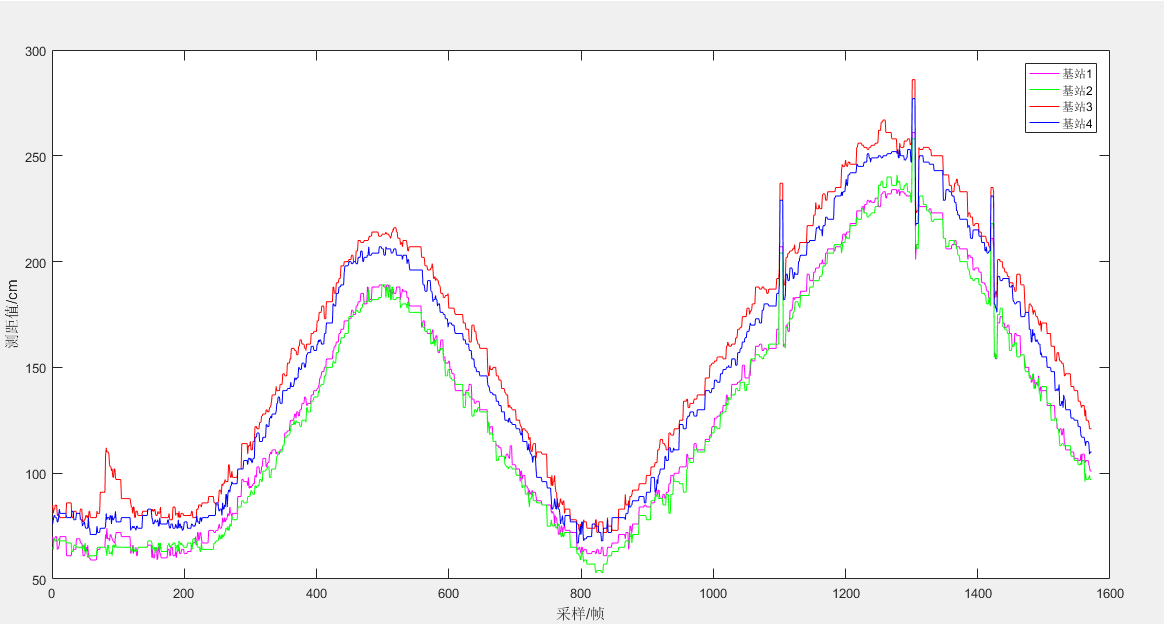
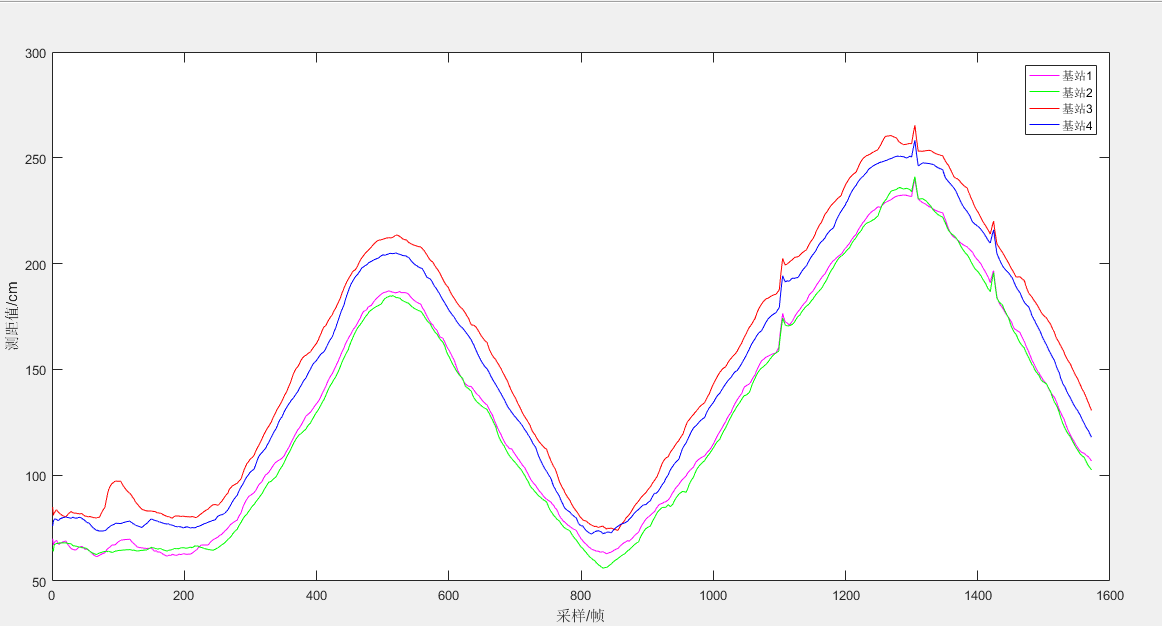
摘要:可靠地定位到跟随目标与箱包的相对位置是实现智能箱包跟随的前提,箱包移动时,自身振动和周围环境不断改变增加定位难度。针对该问题,提出了一种基于UWB定位方法。该方法利用UWB高精度、抗干扰强、低功耗等优点,首先对系统进行无线时钟同步求得距离值,削弱了时钟偏差对测距精度的影响,然后通过加权自适应卡尔曼滤波对距离值进行滤波减小环境的NLOS测距误差,最后以箱包顶面中心点为原点建立坐标系,通过三角质心坐标平均的方法进行位置解算。实验时基站置于箱包四个顶角,标签由跟随目标携带。动态实验和静态实验均表明,该方法有效抑制了UWB系统噪声和环境噪声,可靠地定位标签(跟随目标)的相对位置。
For information in English, please click here
Positioning Research Based on UWB for Following Luggage
Abstract:To solve the positioning problem of intelligent following luggage, the positioning method of installing UWB (Ultra-wide-band) on the following luggage has been put forward for its capability of making self-adaptation to Kalman filtering. When luggage is moving, the noise from UWB system will change in accordance with vibration and surrounding environment. Therefore, the range error of distance measurement can be increased and the inhibitory effect of traditional Kalman filtering on error always cannot meet requirements. Concerning the issues above, a weighted self-adaptation Kalman filter algorithm is proposed. On the basis of synchronized clock and construction of dynamic ranging model, the distance of filters is set and the triangular centroid coordinates are used to calculate the position on average, improving the reliability and accuracy of positioning. UWB system consists of base stations and labels made of DW1000 radio frequency chips. The base stations are placed at top four corners of the luggage and labels are moved by hand. The experimental results show that, this method can help improve the positioning accuracy of labels effectively, and its fitting path is closer to the real path.
Keywords: UWB positioning following luggage range errors adaptive Kalman filtering
基金:
论文图表:




引用


No.****
动态公开评议
共计0人参与
勘误表
基于UWB的跟随箱包对目标的定位研究
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论