深度学习在视觉SLAM研究中的应用综述
首发时间:2019-08-28
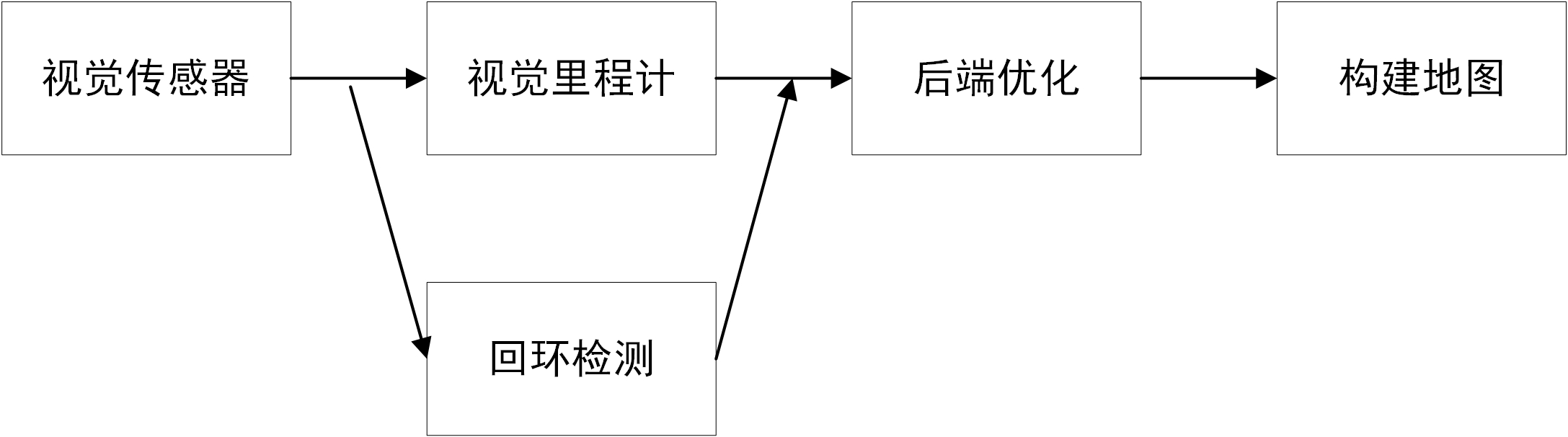
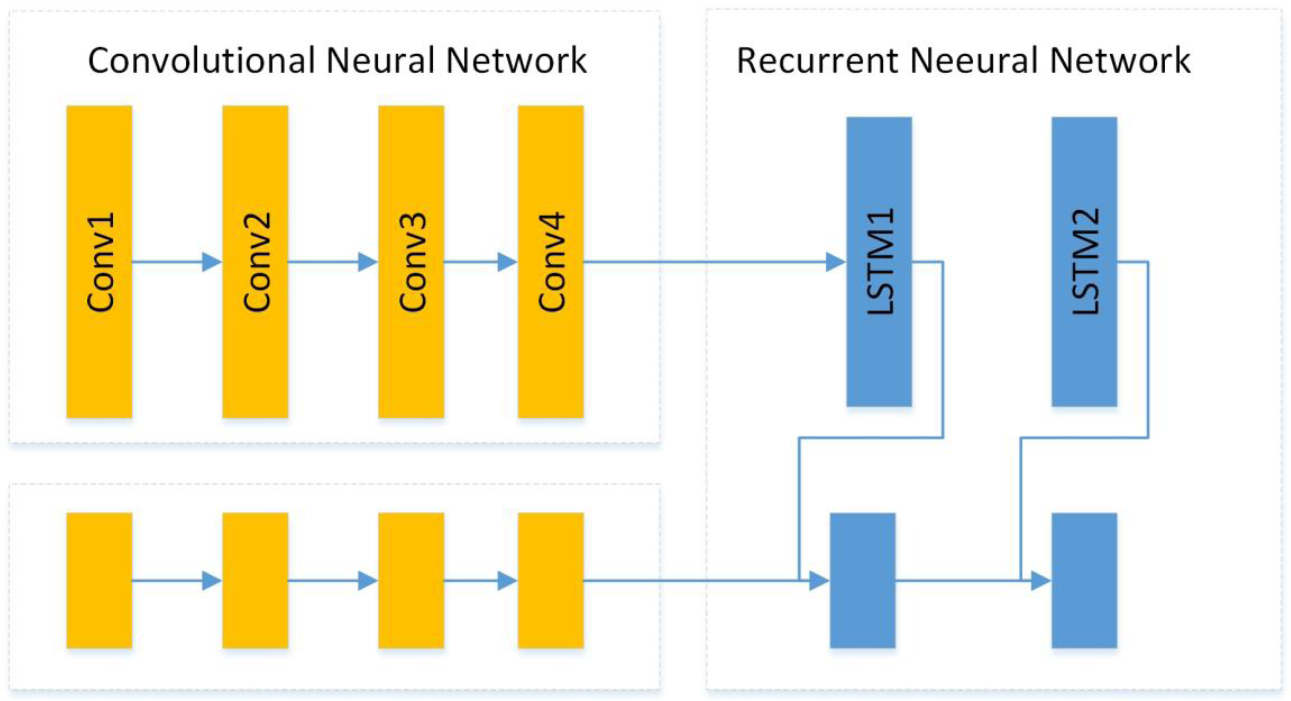
摘要:目前采用视觉传感器的地图同步定位与地图构建(SLAM)逐渐成为SLAM研究中的重点方向,首先介绍了视觉SLAM的基本结构,并分析了传统中特征点法和直接法的局限性;然后重点对视觉SLAM中采用深度学习方法的视觉里程计和回环检测的最新研究成果进行了综述,并把深度学习方法和传统方法进行了简要对比;最后对视觉SLAM的发展趋势进行展望。
For information in English, please click here
A Survey of Visual SLAM Application of Deep Learning in Visual SLAM Research
Abstract:At present, Simultaneous Localization and Mapping (SLAM) using visual sensors has gradually become a hot research topic of SLAM. Firstly, the basic structure of visual SLAM is introduced, and the limitations of traditionalfeature-based method and direct method are analyzed. Then the latest research results of visual odometry and loop closure detection using depth learning method in visual SLAM are reviewed, and the deep learning method and traditional method are compared briefly. Finally, the development trend of visual SLAM is proposed.
Keywords: deep learning visual SLAM((simultaneous localization and mapping) visual odometry loop closure detection
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
深度学习在视觉SLAM研究中的应用综述
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论