3-PSR机构的误差分析与补偿
首发时间:2019-09-24
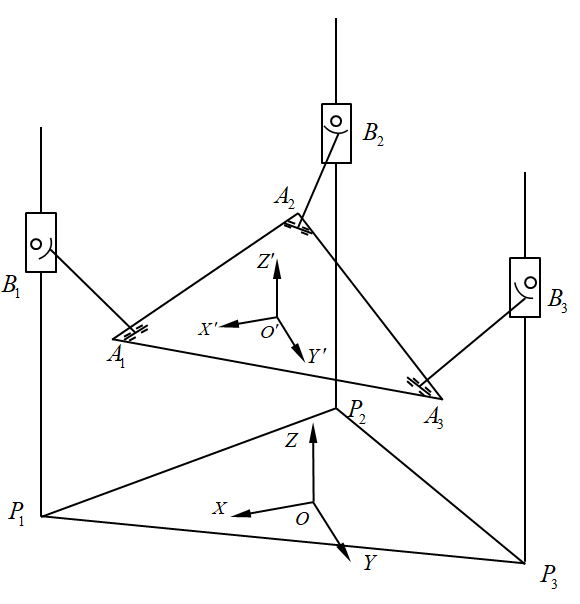
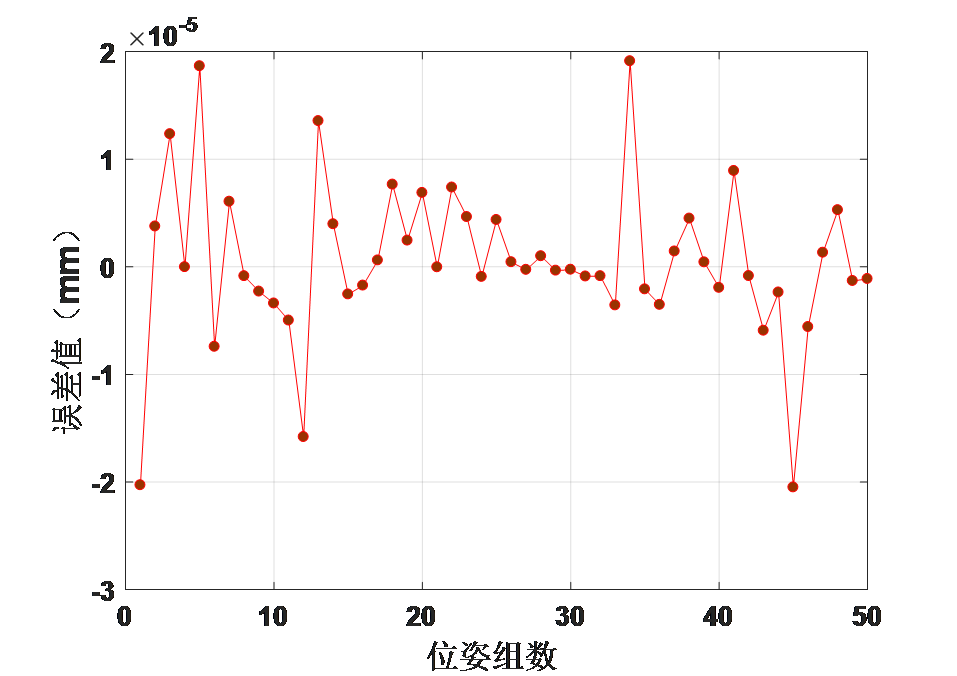
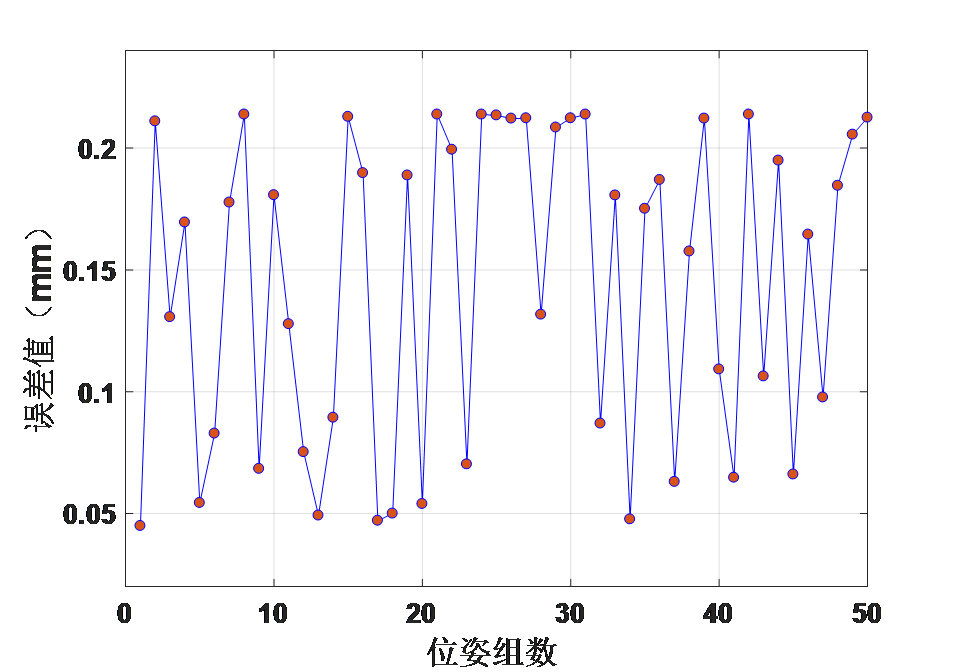
摘要:并联机构是近年来研究的热点。本文针对3-PRS 机构,首先通过解析法进行运动学逆解的求解,再运用牛顿迭代法进行正向运动学正解。之后基于3-PSR机构运动学的正逆解,利用微分法建立3-PSR机构误差模型,根据3-PSR机构的误差模型,建立其末端位姿的误差补偿模型,通过预先给四个驱动滑块一定的输入补偿量的方法以实现误差补偿。最后随机选取50组3-PSR末端姿态为例进行误差补偿试验,证明了该补偿方法的有效性,为后续研究提供了理论基础。
For information in English, please click here
Error Analysis and Compensation of 3-PSR Mechanism
Abstract:Parallel mechanism is a hotspot in recent years. In this paper, for the 3-PRS mechanism, the inverse kinematics solution is firstly solved by analytic method, and then the forward kinematics solution is solved by Newton iteration method. Then, based on the forward and inverse kinematics solutions of the 3-PSR mechanism, an error model of the 3-PSR mechanism was established by using the differential method. According to the error model of the 3-PSR mechanism, an error compensation model of its terminal pose was established. The error compensation was realized by giving certain input compensation amount to the four driving sliders in advance. Finally, 50 groups of 3-PSR terminal attitude were randomly selected for error compensation test, which proved the effectiveness of the compensation method and provided a theoretical basis for subsequent research.
Keywords: Parallel mechanism kinematics The error analysis Error compensation
基金:
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
3-PSR机构的误差分析与补偿
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论