末端牵引式手指康复机器人设计及其柔顺控制方法
首发时间:2020-02-07
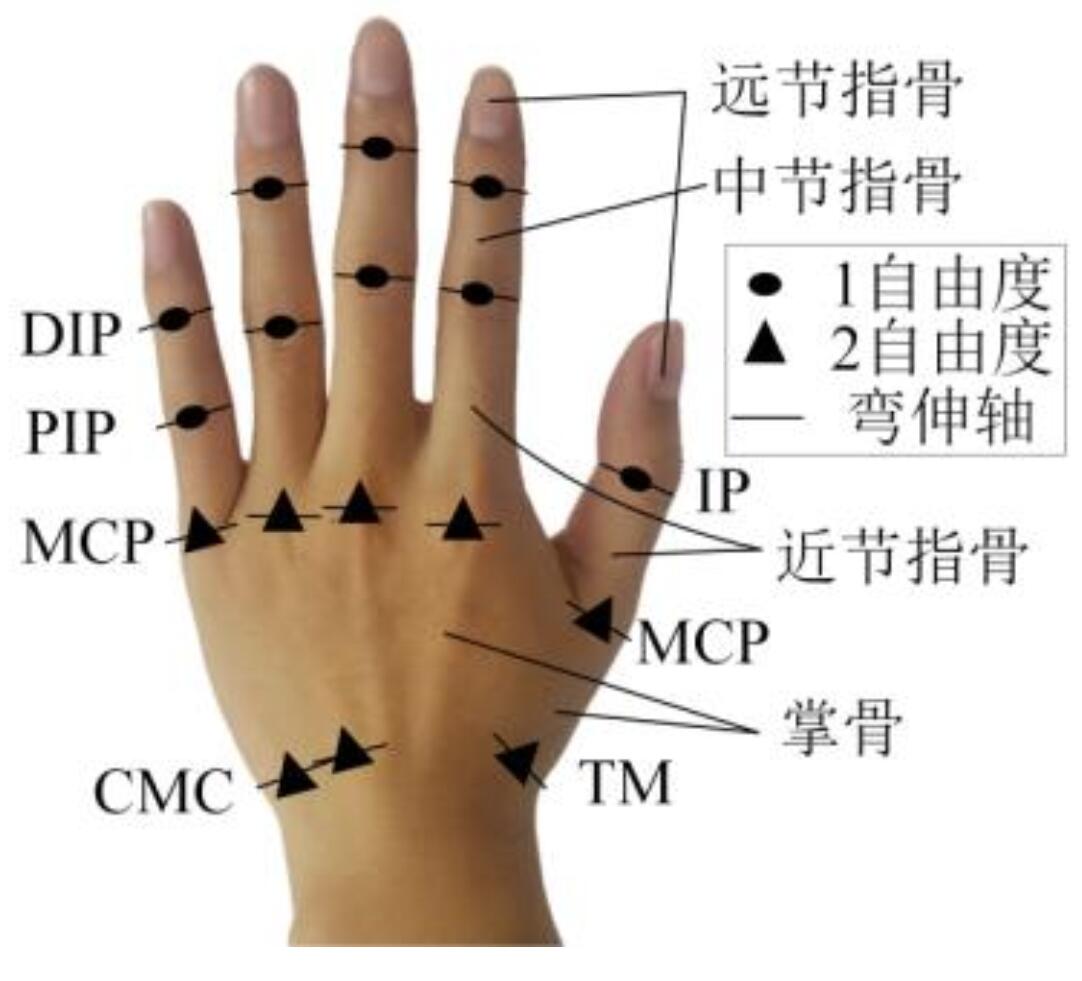
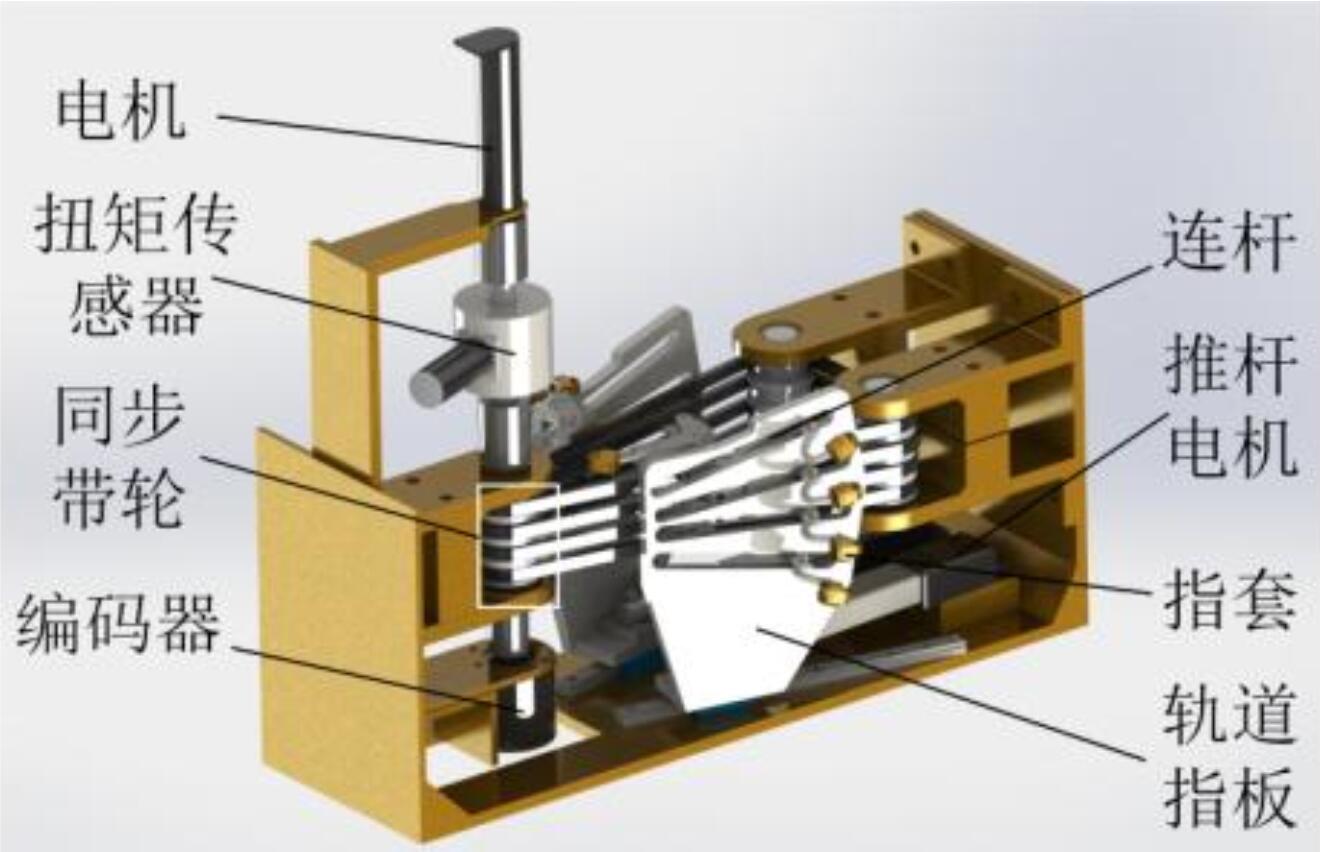
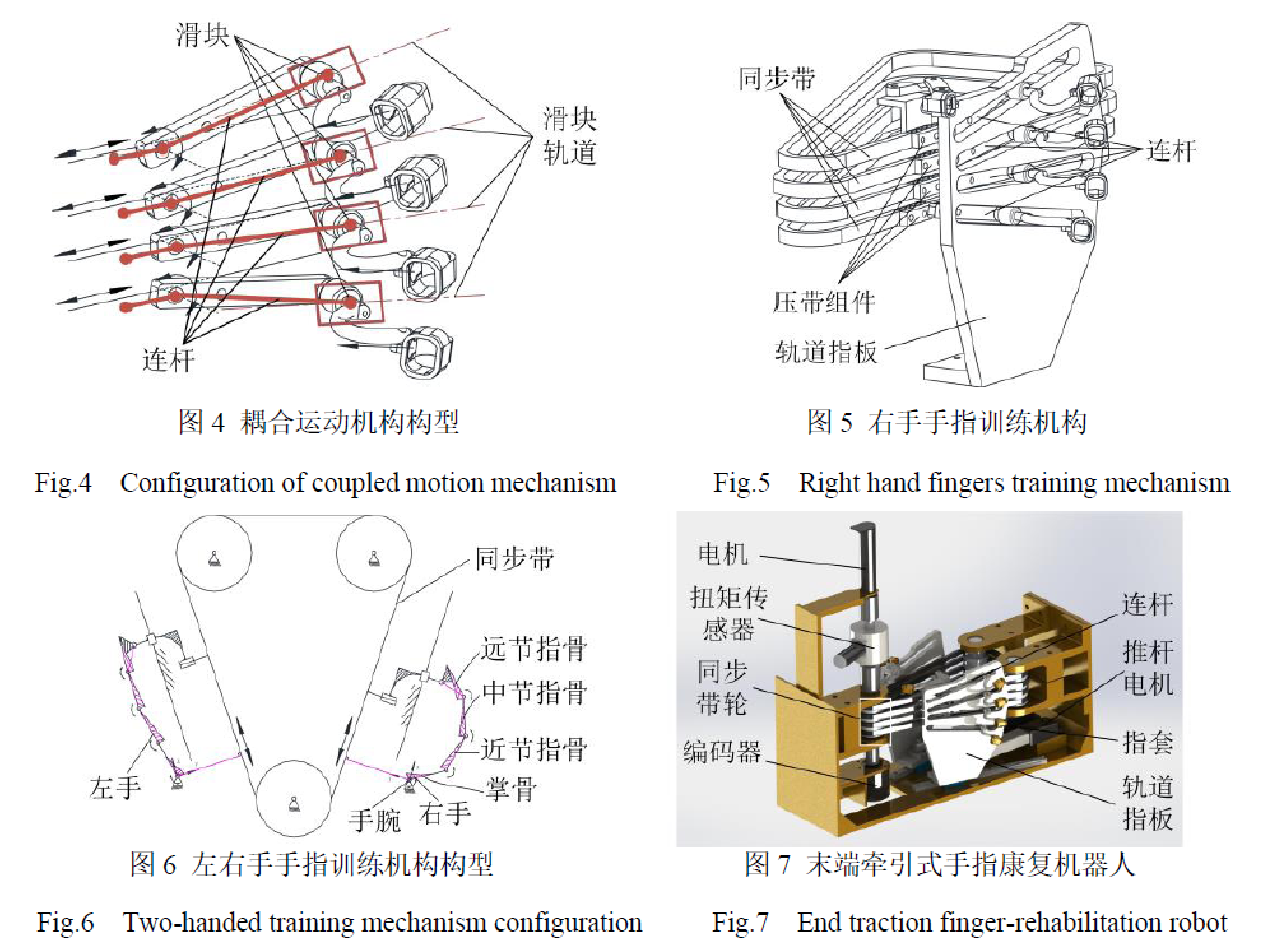
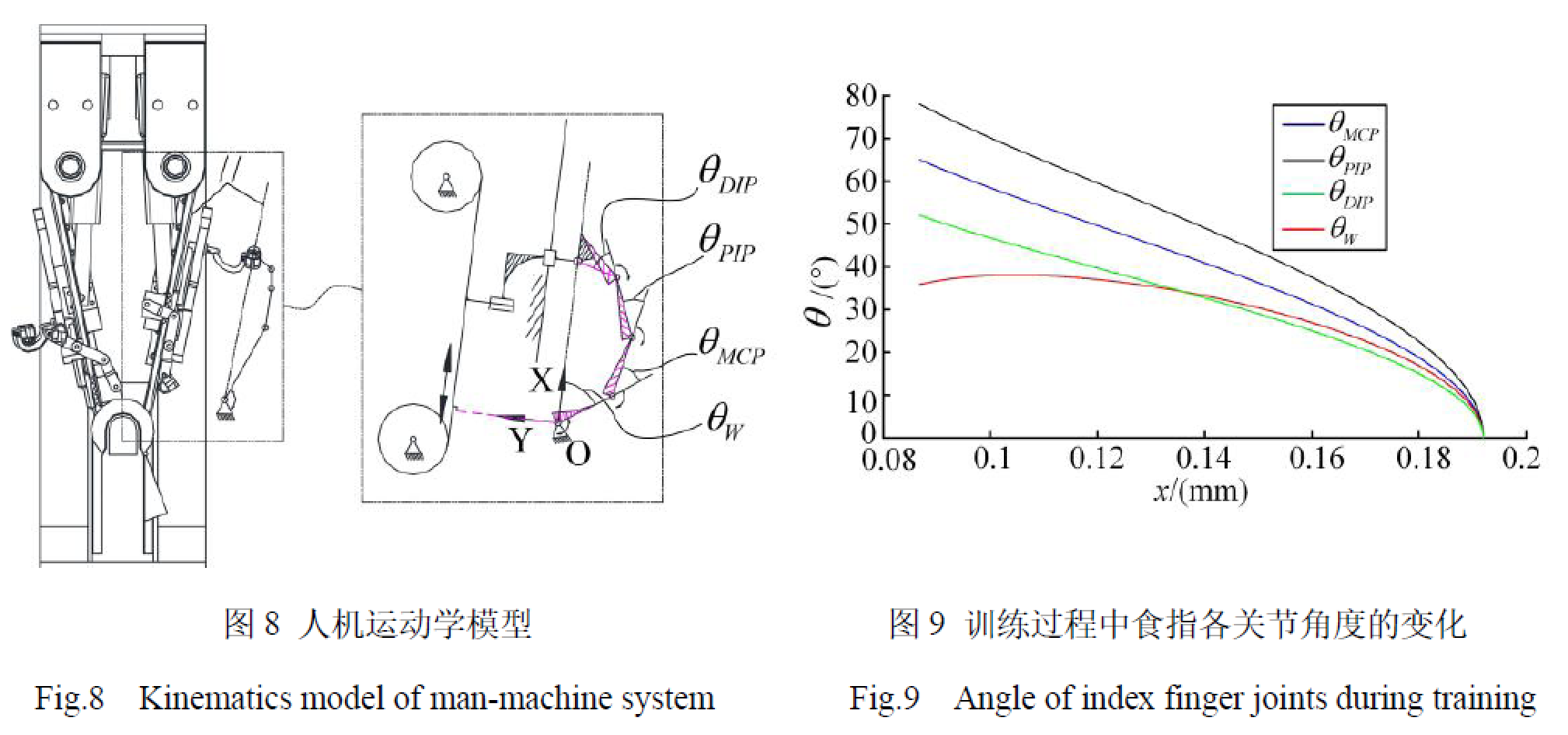
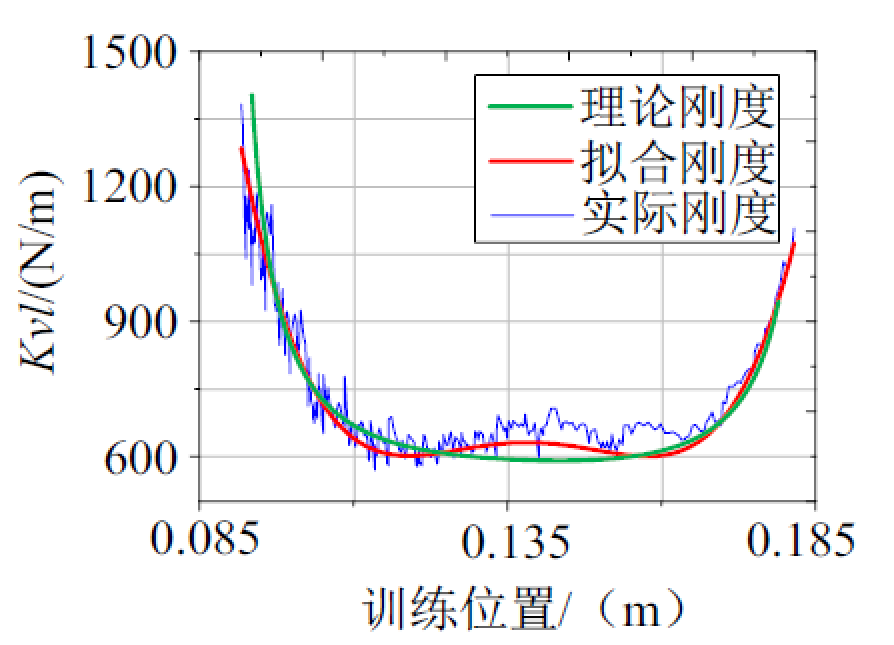
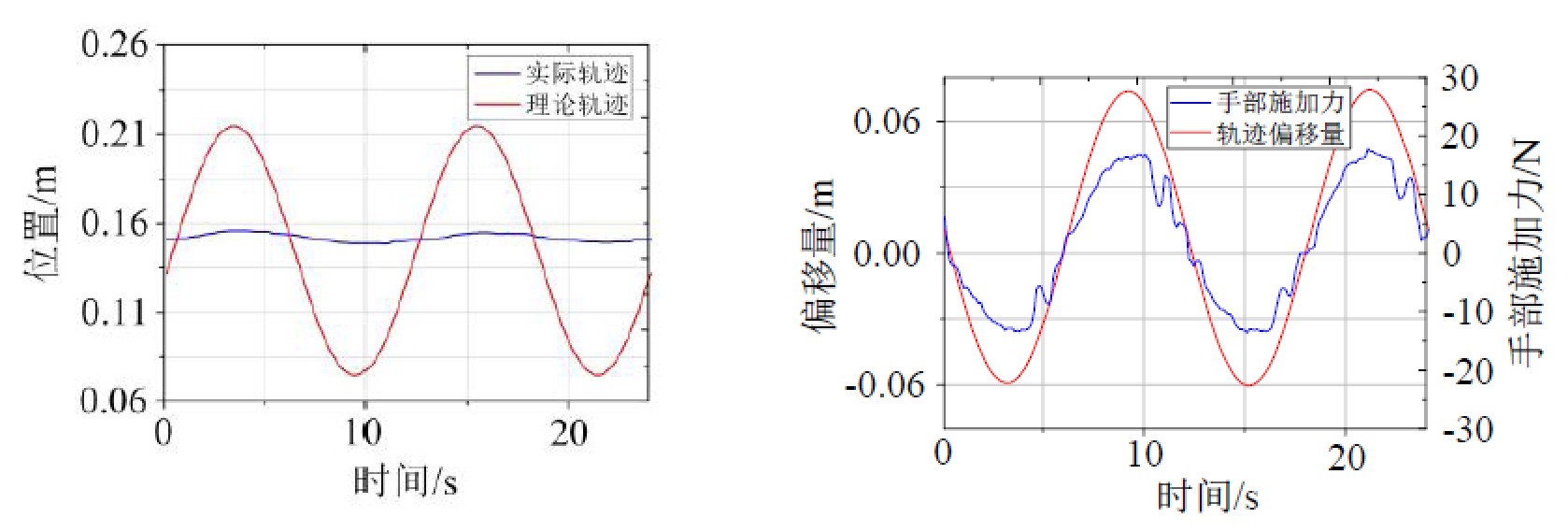
摘要:由于脑卒中等原因导致的人手指运动障碍,给日常生活带来了不便。现有的康复设备存在柔顺性不足、难以适应手部狭小的空间等问题。针对这种情况,本文设计了一种可实现手指屈伸、收展的末端牵引式手指康复机器人,并对其人机模型进行运动学、动力学分析。提出了一种基于手指训练位姿的阻抗控制模型,实现了面向手部关节的机器人变刚度设计。为了对机器人的性能进行验证,搭建了相关试验平台。实验结果表明这种变刚度设计能实现不同训练位置处对应刚度的设定,基于训练中手指位姿信息的阻抗控制器能够实现手指康复训练时的柔顺性控制。
关键词: 机械电子工程 手指康复机器人 变刚度 阻抗控制 柔顺性
For information in English, please click here
Design and Compliant Control for End Traction Finger Rehabilitation Robot
Abstract:There are some obstacles for the finger movement when suffering the stroke, which brings inconvenience to some finger operations in daily life. The existing rehabilitation equipments have problems such as insufficient flexibility and difficulty in adapting to the small space of the hand. In view of this situation, an end traction finger rehabilitation robot was designed to achieve flexion/extension and adduction/abduction in this paper. Meanwhile, the models of kinematics and dynamics of this robot were established, respectively. Then, an impedance control model based on finger training posture was proposed, which can realize the variable stiffness of robot for finger joints. Finally, a test platform was set up for experimental verification. The experimental results showed that this kind of variable stiffness design model can set the corresponding stiffness for different training positions, and the impedance controller based on finger pose can achieve compliance control during finger rehabilitation training.
Keywords: Mechatronic Engineering Finger rehabilitation robot variable stiffness impedance control compliance control
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
末端牵引式手指康复机器人设计及其柔顺控制方法
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论