жӮЁеҪ“еүҚжүҖеңЁдҪҚзҪ®пјҡ
йҰ–йЎө > йҰ–еҸ‘и®әж–Ү
0
0

еҹәдәҺLightGBMзҡ„AGVеӨҡдј ж„ҹеҷЁж•°жҚ®иһҚеҗҲж–№жі•
йҰ–еҸ‘ж—¶й—ҙпјҡ2020-03-19
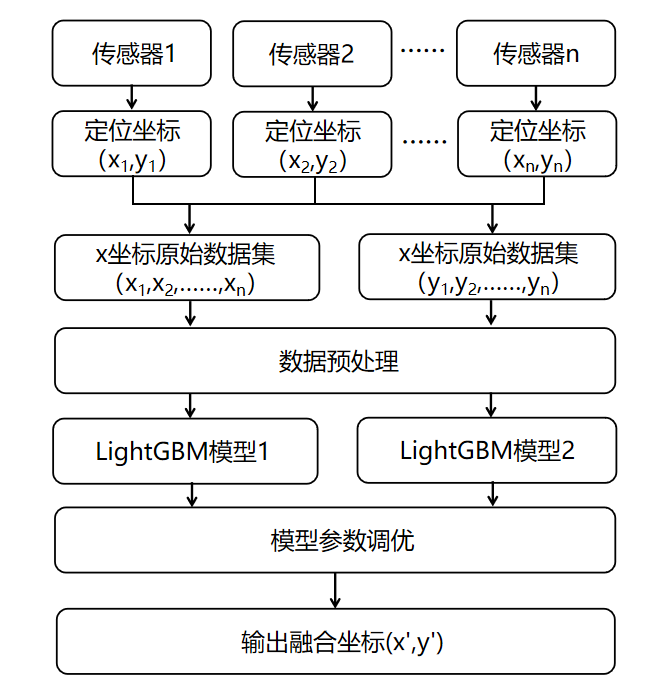
ж‘ҳиҰҒпјҡй’ҲеҜ№AGVиҮӘдё»еҜјеҗ‘иҪҰзҡ„е®ҡдҪҚй—®йўҳпјҢеңЁз ”究еӨ§йҮҸж–ҮзҢ®зҡ„еҹәзЎҖдёҠпјҢжҸҗеҮәдёҖз§ҚеҹәдәҺLightGBMзҡ„AGVеӨҡдј ж„ҹеҷЁж•°жҚ®иһҚеҗҲж–№жі•гҖӮдҪҝз”ЁLightGBMжЁЎеһӢеҜ№дј ж„ҹеҷЁе®ҡдҪҚж•°жҚ®иҝӣиЎҢиһҚеҗҲпјҢе°ҶжҜҸз»„дј ж„ҹеҷЁжЁЎеһӢеҫ—еҲ°зҡ„еқҗж Үж•°жҚ®и§ҶдёәдёҖзұ»зү№еҫҒпјҢй’ҲеҜ№дёӨдёӘж–№еҗ‘дёҠзҡ„еқҗж Үж•°жҚ®еҲҶеҲ«и®ӯз»ғдёӨдёӘLightGBMжЁЎеһӢпјҢеҲ©з”ЁеӨҡз»„зү№еҫҒж•°жҚ®з»„жҲҗзҡ„ж•°жҚ®йӣҶеҜ№жЁЎеһӢиҝӣиЎҢи®ӯз»ғи°ғеҸӮпјҢйҖҡиҝҮз»„еҗҲеӨҡз»„дј ж„ҹеҷЁзҡ„жөӢйҮҸж•°жҚ®жқҘйҷҚдҪҺдёҚзЎ®е®ҡжҖ§пјҢд»ҺиҖҢиҺ·еҫ—й«ҳзІҫеәҰзҡ„е®ҡдҪҚдҝЎжҒҜгҖӮжңҖеҗҺпјҢйҖҡиҝҮзңҹе®һеңәжҷҜе®һйӘҢдёҺеҹәдәҺеҚЎе°”жӣјж»Өжіўзҡ„иһҚеҗҲз®—жі•жҜ”иҫғпјҢйӘҢиҜҒдәҶжң¬ж–№жі•еҜ№AGVе®ҡдҪҚзІҫеәҰжңүжӣҙеҠ жҳҺжҳҫзҡ„жҸҗеҚҮпјҢе®ҡдҪҚзІҫеәҰеҸҜиҫҫ6.3 mmгҖӮ
е…ій”®иҜҚпјҡ дј ж„ҹеҷЁ еӨҡдј ж„ҹеҷЁж•°жҚ®иһҚеҗҲ AGVе®ҡдҪҚ LightGBMжЁЎеһӢ
For information in English, please click here
A multi-sensor data fusion method based on LightGBM model for AGV localization
AbstractпјҡAiming at the positioning problem of automated guided vehicles, based on a large amount of literature research, a LightGBM-based AGV multi-sensor data fusion method was proposed. The LightGBM model is used to fuse the sensor positioning data, and the coordinate data obtained from each group of sensor models is regarded as a type of feature. Models are trained for two LightGBM coordinate data in both directions, using a plurality of sets of data consisting of characteristic data set to train the model parameter adjustment. A plurality of sets of measured data by the sensor was combined to reduce the uncertainty, thereby obtaining a highly accurate positioning information.Finally, through real-world experiments comparing with the Kalman filter fusion algorithm, the method has verified more significantly improved positioning accuracy of the AGV, the positioning accuracy of up to 6.3 mm.
Keywordsпјҡ sensor multi-sensor data fusion AGV positioning LightGBM model
еҹәйҮ‘пјҡ
и®әж–ҮеӣҫиЎЁпјҡ
еј•з”Ё


No.****
еҠЁжҖҒе…¬ејҖиҜ„и®®
е…ұи®Ў0дәәеҸӮдёҺ
еӢҳиҜҜиЎЁ
еҹәдәҺLightGBMзҡ„AGVеӨҡдј ж„ҹеҷЁж•°жҚ®иһҚеҗҲж–№жі•
дёӯеӣҪ科жҠҖи®әж–ҮеңЁзәҝ зүҲжқғжүҖжңү
зҪ‘з«ҷең°еӣҫ|
еңЁзәҝйҰ–йЎө|
еңЁзәҝз®Җд»Ӣ|
жңҚеҠЎжқЎж¬ҫ|
иҒ”зі»жҲ‘们

дә¬е…¬зҪ‘е®үеӨҮ 11040202430024еҸ· дә¬ICPеӨҮ15006316еҸ·-2| зҪ‘з»ңеҮәзүҲжңҚеҠЎи®ёеҸҜиҜҒ пјҲжҖ»пјүзҪ‘еҮәиҜҒпјҲдә¬пјүеӯ—第083еҸ· | ж–ҮдҝқзҪ‘е®үеӨҮжЎҲеҸ·пјҡ1101080066


 .txt
.txt .ris
.ris .doc
.doc
иҜ„и®ә
е…ЁйғЁиҜ„и®ә