基于ESO和滑模法的四旋翼飞行器控制系统设计
首发时间:2020-04-01
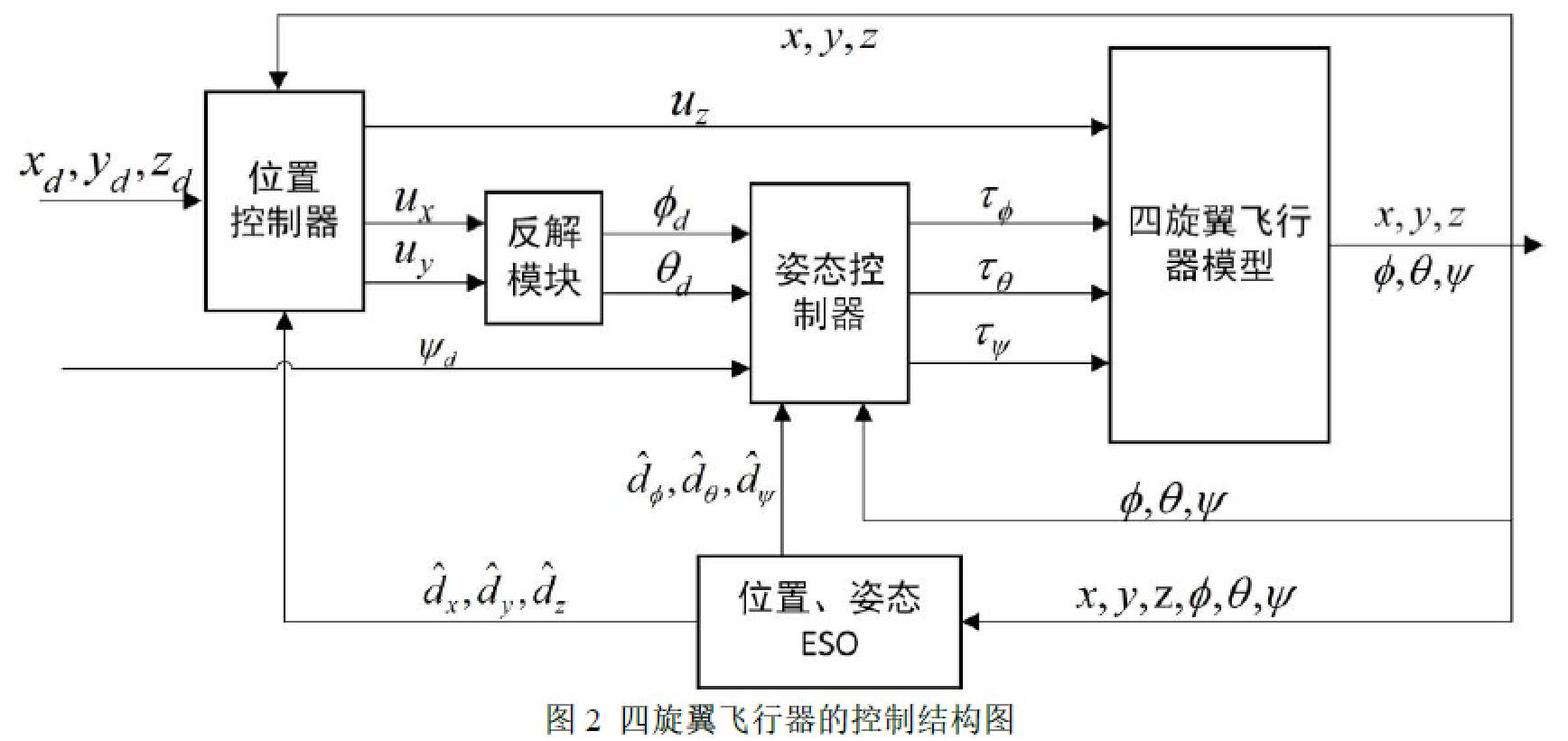
摘要:针对四旋翼飞行器在自身建模不完全的情况下和飞行过程中受到外界环境干扰的影响下,为了保证各个输出能够稳定精确地跟踪给定信号;本文提出一种基于扩张状态观测器(ESO)和积分滑模(Integral_SMC)的控制策略。根据系统反馈的特点,将积分滑模分别应用在内外环控制回路中,同时采用扩张状态观测器对系统受到的复合干扰进行估计并通过控制律进行实时补偿,最后通过Lyapuouv理论证明了系统的稳定性;仿真结果验证了所提控制策略的有效性;相对于普通的滑模控制,基于ESO和积分滑模的控制算法具有更好的抗干扰性和鲁棒性。
For information in English, please click here
Design of Quadrotor Control System Based on ESO and Sliding Mode Control
Abstract:Under the influence of the incomplete modeling of the four-rotor aircraft and the external environment during flight, it is ensured that each position and yaw angle can stably and accurately track the given signal; This paper proposes a control strategy based on the extended state observer (ESO) and integral sliding mode (ISMC). According to the strict feedback architecture of the system, the integral sliding mode is applied to the inner and outer loop control loops respectively. At the same time, the extended state observer is used to estimate the composite interference received by the system and compensated in real time through the control law. The stability of the system is proved by Lyapunov theory; The simulation results verified the effectiveness of the control strategy. Compared with the common sliding mode control, the control algorithm based on ESO and integral sliding mode has better anti-interference and robustness.
Keywords: quadrotor integral sliding mode extended state observe compound interference
基金:
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
基于ESO和滑模法的四旋翼飞行器控制系统设计
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论