一种基于Kalman滤波的目标数据关联算法
首发时间:2020-12-28
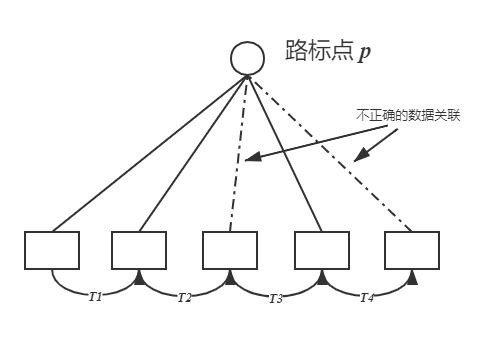
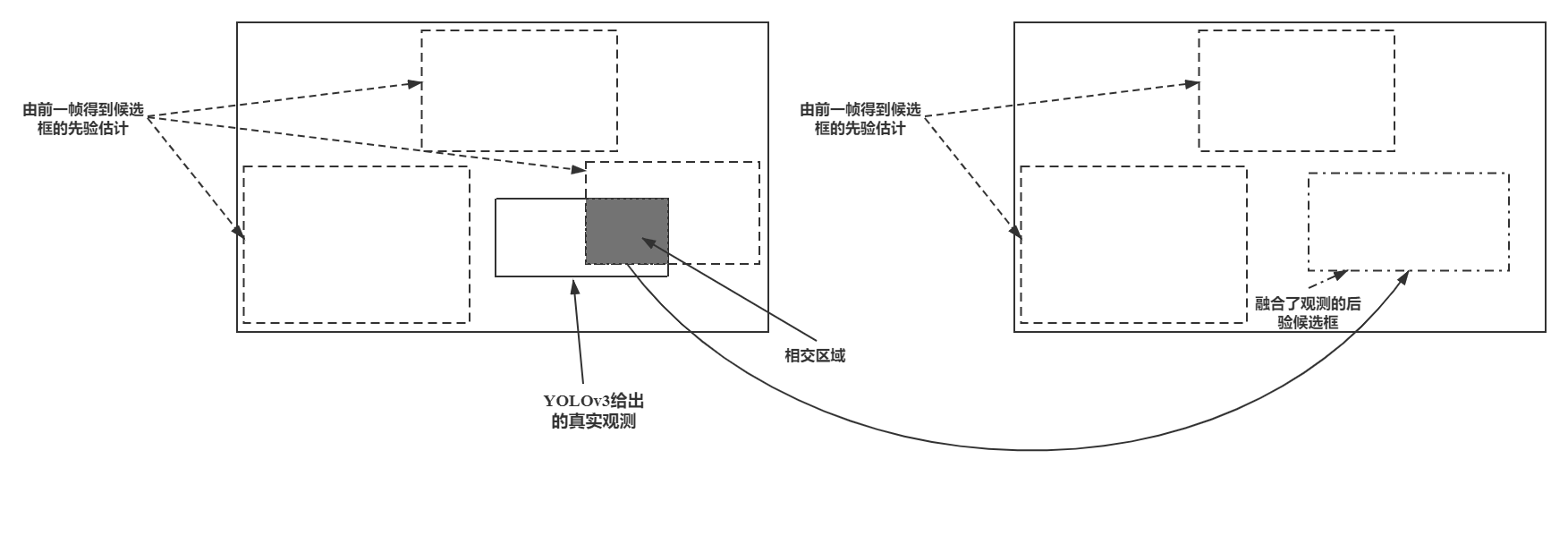
摘要:随着人工智能研究的发展,大量机器学习的结果被引入到SLAM系统的研究中,语义SLAM也逐渐成为机器人与传感器领域的研究热点。语义SLAM与传统视觉SLAM不同的是需要解决语义信息的关联与融合的问题。本文在开源ORB-SLAM2系统的基础上推导了单目特征点法融合语义分割信息的优化模型,在这基础上设计了一种基于Kalman滤波的数据关联算法以关联物体观测信息,并使用语义信息剔除错误关联。实验表明,融合语义信息的优化模型能有效提高单目SLAM系统的定位精度,在此基础上设计的数据关联算法相比基于图像交并比的方法更具鲁棒性。
关键词: 视觉SLAM 语义SLAM Kalman滤波 数据关联 ORB-SLAM
For information in English, please click here
An Object Data Association Method Based on Kalman Filter
Abstract:With the development of artifical intelligence, the results of machine learning have been introduced into the research of SLAM system. As a result, Semantic SLAM becomes a hotspot in the field of robotics and sensors. Semantic SLAM system has to solve the problem of semantic information association and fusion, which is different from traditional vSLAM. Based on the ORB-SLAM2, this paper deduces the optimization model of monocular SLAM system for semantic segmentation information fusion, and designs a data association method based on Kalman Filter to correlate object observation informationusing the semantic information to corect the wrong associations. The experimental results show that the proposed model can effectively improve the positioning precisionof the monocular SLAM, and the data association method designed on this basis is more robust than the common used IoU method.
Keywords: vSLAM Semantic SLAM Kalman Filter Data Association ORB-SLAM
基金:
论文图表:
引用


No.****
动态公开评议
共计0人参与
勘误表
一种基于Kalman滤波的目标数据关联算法
中国科技论文在线 版权所有
网站地图|
在线首页|
在线简介|
服务条款|
联系我们

京公网安备 11040202430024号 京ICP备15006316号-2| 网络出版服务许可证 (总)网出证(京)字第083号 | 文保网安备案号:1101080066



 .txt
.txt .ris
.ris .doc
.doc
评论
全部评论